By going through these CBSE Class 11 Physics Notes Chapter 5 Law of Motion, students can recall all the concepts quickly.
Law of Motion Notes Class 11 Physics Chapter 5
→ Inertia is proportional to the mass of the body.
→ The force causes acceleration.
→ In the absence of force, a body moves along a straight-line path.
→ If the net external force on a body is zero, its acceleration is zero. Acceleration can be non-zero only if there is a net external force on the body.
→ If a body moves along a curved path, then it is certainly acted upon by a force.
→ C.G.S. and S.I. absolute units of force are dyne and newton (N) respectively and 1 N = 105 dynes.
→ C.G.S. and S.I. gravitational units of force are gm wt. and kg wt. (i.e. kilogram weight) respectively and 1 kg wt = kgf.
→ 1 gm wt = 1 gmf, 1 kg f = 103 gm f.
→ 1 kg f = 9.8 N.
→ 1 gm f = 1 gm wt = 980 dyne.
→ Impulse = change in momentum.
→ Four types of forces exist in nature, they are gravitational force (Fg), electromagnetic force (Fem), weak force (Fw), and nuclear force (Fn).
→ Fg: Fem: Fw: Fn:: 1: 1025: 1036: 1038.
→ Rocket works on the principle of conservation of linear momentum.
→ Rocket ejects gases backward and as a result, acquires a forward momentum.
→ If Δm is the mass of the gas ejected backward in time At with speed u, then the force acting on the rocket will be:
F = u \(\frac{\Delta m}{\Delta t}\)
→ When a force acting on a particle is always perpendicular to its velocity, then the path followed by the particle is a circle.
→ In a uniform circular motion, the magnitude of velocity always remains constant and only its direction changes continuously.
→ If a body moves with a vertical acceleration a, then its apparent weight is given by:
R = m (g – a)
→ The weight of a body measured by the spring balance in a lift is equal to the apparent weight.
→ The apparent weight of a body falling freely is zero because for it, a = g. It is the case of weightlessness.
→ If the lift falls with a < g, the apparent weight of the body decreases.
→ If the lift accelerates upwards, the apparent weight of the body increases.
→ The true weight of the body = mg.
→ If the lift rises or falls with constant speed, then apparent weight = true weight
→ If the person climbs up along the rope with acceleration ‘a’, then tension in the rope will be T = m (g + a).
→ If the person climbs down along the rope with acceleration ‘a’, then tension in the rope will be T = m (g – a).
→ If the person climbs up or down the rope with uniform velocity, then tension in the string, T = mg.
→ If a body starting from rest moves along a smooth inclined plane of length l, height h and having an angle of inclination 0, then:
1. Its acceleration down the plane is g sin θ.
2. Its velocity at the bottom of the inclined plane will be
\(\sqrt{2 \mathrm{gh}}=\sqrt{2 \mathrm{~g} l \sin \theta}\)
3. Time taken to reach the bottom will be:
t = \(\sqrt{\frac{2 l}{g \sin \theta}}=\left(\frac{2 l^{2}}{g h}\right)^{\frac{1}{2}}\)
= \(\left(\frac{2 \mathrm{~h}}{\mathrm{~g} \sin \theta}\right)^{\frac{1}{2}}=\frac{1}{\sin \theta}\left(\frac{2 \mathrm{~h}}{\mathrm{~g}}\right)^{\frac{1}{2}}\)
4. If the angle of inclination is changed keeping the length constant, then:
\(\frac{\mathrm{t}_{1}}{\mathrm{t}_{2}}=\left(\frac{\sin \theta_{2}}{\sin \theta_{1}}\right)^{\frac{1}{2}}\)
5. If the angle of inclination is changed keeping the height constant, then
\(\frac{\mathrm{t}_{1}}{\mathrm{t}_{2}}=\frac{\sin \theta_{2}}{\sin \theta_{1}}\)
→ A system or a body is said to be in equilibrium when the net force acting on it is zero.
→ If the vector sum of a number of forces acting on a body is zero, then it is said to be in equilibrium.
→ Friction acts opposite to the direction of motion of the body and parallel to the surfaces in contact.
→ Friction depends on the nature of surfaces in contact.
→ Friction is more when the surfaces in contact are rough.
→ Friction is a necessary evil it causes the dissipation of energy. But we need.
→ Friction is of different types such as static friction, kinetic (sliding or rolling) friction, dry friction, wet friction.
→ Static friction is a variable force.
→ The maximum value of static friction is called limiting friction.
→ Static friction is equal and opposite to the force applied to the body.
→ When the applied force is equal to the limiting friction, the body begins to slide.
→ The kinetic friction is less than the limiting friction.
→ The friction on a rolling body is called rolling friction.
→ The rolling friction is less than sliding friction.
→ Friction is a self-adjusting force.
→ The limiting friction is directly proportional to the normal reaction i. e. F ∝ R.
→ The net reactive force acting perpendicular to the surface is called normal reaction (R) and is equal to the force with which the two bodies are pressed against each other.
→ The ratio of limiting friction (F) to the normal reaction (R) is called the coefficient of limiting friction (μl) i.e. μl = F/R.
→ The limiting friction is independent of the shape or area of surfaces in contact if R = constant.
→ μl is a dimensionless constant. It depends on the nature of the surfaces in contact. It is independent of the normal reaction.
→ No work is done against static friction.
→ The kinetic friction opposes the motion of the body.
→ Static friction is the frictional force that comes into play when a body tends to move on the surface of another body.
→ Static friction is due to the interlocking of microscopic projections on the surface of the body.
→ The change from static to kinetic friction is by a stick and slip process. The slip is a break away from the static condition.
→ Sticking is caused by the second interlocking.
→ Kinetic friction is a constant force.
→ It is independent of the applied force.
→ The coefficient of kinetic friction is equal to the ratio of kinetic friction (Fk) to the normal reaction (R) i.e. μk = Fk/R.
→ Fk is independent of the area of contact between two bodies.
→ Work is done against kinetic friction.
→ Coefficient of rolling friction (μr) = \(\frac{\mathrm{F}_{\mathrm{r}}}{\mathrm{R}}=\frac{\text { rolling friction }}{\text { normal reaction }}\)
→ μr < μk < μs.
→ The friction between two solid surfaces is called dry friction.
→ The friction between a solid surface and a liquid surface is called wet friction.
→ The dry friction causes squeaking of the surfaces trying to move over each other.
→ The dry friction can also cause pleasant sound e.g. the bow under-going stick and slip motion on the string of violin causes pleasant sound.
→ Friction can be decreased by converting dry friction to wet friction.
→ Friction may increase if the surfaces are highly polished. This happens due to cold welding together of the polished surfaces.
→ The angle between the normal reaction and the resultant force of friction and the normal reaction is called the angle of friction (θ).
→ µ = tan θ i.e. coefficient of friction = tan θ.
→ The angle of the inclined plane at which the body placed on it just begins to slide down is called the angle of repose (α) or angle of sliding.
→ µ = tan α.
→ Also α = θ.
→ When a body rotates, all its particles describe circular paths about a line called the axis of rotation.
→ The centers of circles described by the different particles of the rotating body lie on the axis of rotation.
→ The Axis of rotation is perpendicular to the plane of rotation.
→ For uniform circular motion, we have
- ac = v2/r = rω2
- v = rω
- a ∝ r
where α = angular acceleration.
→ When a body rotates with uniform velocity, its different particles have centripetal acceleration directly proportional to the radius i.e. ac ∝ r.
→ There can be no circular motion without centripetal force.
→ Centripetal force can be a mechanical, electrical, or magnetic force.
→ In a uniform circular motion, the magnitude of momentum, velocity, and kinetic energy remains constant.
→ Centrifugal force is the pseudo force that is equal and opposite to the centripetal force. It is directed away from the center along the radius.
→ The centrifugal force appears to act on the agency which exerts the centripetal force.
→ The centrifugal force cannot balance the centripetal force because they act on different bodies.
→ The railway tracks and roads are banked for safe turning. The banking angle θ for safe turning is tan θ = \(\frac{\mathbf{v}^{2}}{r g}\) . Also tan θ = \(\frac{\mathrm{h}}{\mathrm{d}}\)
where d = width of road
h = height of the outer edge of the road above the inner edge
→ Maximum speed of the car without overturning when it moves on a circular banked road of radius r is
umax = \(\sqrt{\frac{\mathrm{grd}}{\mathrm{h}}}\)
when d = \(\frac{1}{2}\) of the distance between two wheels of the car.
→ When a particle of mass m, tied to a string of length is rotated in a horizontal plane with a speed ‘y’, the tension is given by
T = \(\frac{m v^{2}}{r}\)
→ When the string breaks, the particle moves away from the center but tangentially.
→ K.E. of a body rotating in a vertical plane is different at different points.
→ The angle through which the outer edge of the road track is raised above the inner edge is called the angle of banking of roads/ tracks.
→ For safe going of the vehicle round the circular level road, the required condition is:
μ ≤ \(\frac{\mathrm{v}^{2}}{\mathrm{rg}}\)
→ A simple pendulum oscillates in a vertical plane. It will oscillate only if its motion is in the lower semi-circle.
→ For oscillation, the velocity at the lowest point L must be such that the velocity reduces to zero at points M1 and M2.
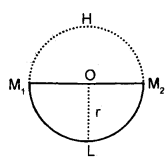
Thus, \(\frac{1}{2}\)mve2 = mgr
or
ve = \(\sqrt{2 \mathrm{gr}}\)
i.e ve ≤ \(\sqrt{2 \mathrm{gr}}\)
→ If ve > \(\sqrt{2 \mathrm{gr}}\) it will not then oscillate in the lower semi-circle.
→ Minimum velocity that a body should have at the lowest point (L) and highest point (H) of a vertical circle for looping it are
v1 = \(\sqrt{5 \mathrm{gr}}\) and v2 = \(\sqrt{\mathrm{gr}}\)
where v1 and v2 are velocities at L and H points respectively. Maximum speed with which a vehicle can take a safe turn on a level road is v = \(\sqrt{\mu \mathrm{gr}}\).
→ Maximum speed of the vehicle with which it can take a safe turn on a banked road is given by
v = \(\sqrt{rgθ}\)
→ Sufficient force of friction is there between the tyres of the vehicle and the banked road, then the maximum speed of the vehicle for taking a safe turn is given by
vmax = \(\left(rg\frac{\mu_{\mathrm{s}}+\tan \theta}{1-\mu_{\mathrm{s}} \tan \theta}\right)^{\frac{1}{2}}\)
→ The first law is also called the law of inertia according to which the state of rest or uniform motion of a body remains the same unless acted upon by an external force.
→ The action and reaction always occur in pairs.
→ The position of an event or particle is measured by using a system of coordinates called a frame of reference.
→ There are two types of frame of reference
- inertial and
- non-inertial (or accelerated frame of reference).
→ A frame of reference with uniform motion with respect to another inertial frame of reference is also the inertial frame of reference in which the body is situated and obey’s Newton’s law of motion.
→ Inertia: A body at rest or in uniform motion continues in its state unless acted upon by an external force.
→ Force: Force is the action that changes or tends to change the state of rest or uniform motion of a rigid body along a straight line.
→ Rigid body: A body whose various particles move through the same distance parallel to each other under the action of external force i.e. there is no relative motion amongst the various particles of the body under the action of an external force is called a rigid body.
→ Linear momentum (p).: The quantity of motion possessed by a body is called its momentum Mathematically the linear momentum of the body is equal to the product of its mass and velocity i.e.
p = mv
→ Retardation: The quantity of hindrance in the motion of a body is called retardation and the force which retards the body is called retarding force.
→ Newton’s first law of motion: A body continues in its state of rest or uniform motion along a straight line in the absence of external force.
This is called Newton’s first law of motion.
\(\overrightarrow{\mathrm{F}}\) ∞ \(\frac{\mathrm{d}(\overrightarrow{\mathrm{p}})}{\mathrm{dt}}\)
or
\(\overrightarrow{\mathrm{F}}\) = k m\(\overrightarrow{\mathrm{a}}\)
In non-relativistic dynamics \(\frac{\Delta \overrightarrow{\mathrm{v}}}{\Delta \mathrm{t}}=\overrightarrow{\mathrm{a}}\), the acceleration of the body or particle.
When force F, mass m and acceleration arc measured in Newton, kilogram and meter per second respectively. i.e. in S.L units. so that
\(\overrightarrow{\mathrm{F}}\) = m \(\overrightarrow{\mathrm{a}}\)
Its scalar from is F = ma
→ Newton (N): It is the SI unit of measurement of force. One newton is that force that causes an acceleration of 1 ms 2 in a rigid body of mass 1 kg.
∴ 1 N = 1 kg × 1 ms-2
→ Impulse: The impact of force is called impulse. Mathematically impulse = F × Δt = force × time. So impulse = m(Δv).
→ The inertia of rest: The property of a body to be unable to change its state of rest itself is called the inertia of rest,
→ The inertia of motion: The property of a body by virtue of which it cannot change by itself its state of uniform motion is called inertia of motion.
→ The inertia of direction: The property of a body by virtue of which it cannot change its own direction of motion is called the direction of inertia.
→ Newton’s third law of motion: States that “To every action, there is an equal and opposite reaction.”
FBA = – FAB
where FAB = force exerted on body 8 by body A, and FBA = force exerted on body A by body B.
→ Law of conservation of linear momentum: The linear momentum of an isolated system of bodies or particles is always conserved, that is it remains constant.
→ Static equilibrium: A body is said to be in static equilibrium if the vector sum of all the forces acting on it is zero. This is a necessary and sufficient condition for a point object only.
→ Lubricants: The substances which are applied to the surfaces to reduce friction are called lubricants.
Important Formulae:
→ Linear momentum of a body of mass m and moving with a velocity v is: p = mv
→ Change in momentum, Δp = m Δ v
→ If two objects of masses M and m have same momentum, then
\(\frac{M}{m}=\frac{v}{V}\)
→ F = ma
→ Resultant of two forces F, and F2 acting simultaneously at angle θ is given by F = F1 + F2
The magnitude of F is given by parallelogram law of vectors
F = \(\sqrt{F_{1}^{2}+F_{2}^{2}+2 F_{1} F_{2} \cos \theta}\)
→ The orthogonal components of F and a are:
F = Fxi + Fyj + Fzk
and a = axi + ayj + azk
→ Inertial mass, m1 = \(\frac{\mathrm{F}}{\mathrm{a}}\)
→ Gravitational mass, mg = \(\frac{\mathrm{F}}{\mathrm{g}}\)
→ Impulse I = FΔt = mΔv
→ Newton’s third law of motion:
F12 = – F21
or
m1a1 = – m2a2
→ Equilibrium of body under three concurrent forces:
F1 + F2 + F3 = 0
Or
F3 = – (F1 +F2)
→ Simple pulley: a = acceleration of masses m1 and m2
= \(\left(\frac{m_{2}-m_{1}}{m_{1}+m_{2}}\right)\)
If m2 > m1
Tension in the string connecting the two masses and passing over the pulley is given by
T = \(\left(\frac{2 m_{1} m_{2}}{m_{1}+m_{2}}\right)\)g
→ Solving problems using Free Body Diagram Technique:
- Draw a simple neat diagram of the system as per the given problem.
- Isolate the object of interest. This is now called a free body.
- Consider all the external forces acting on the free body and mark them by arrows touching the free body with their line of action clearly represented.
- Now apply Newton’s second law of motion.
- In a non-inertial frame consider the pseudo forces like real forces acting on the object in addition to other external forces. The direction of such a force will be opposite to the direction of acceleration of the frame of reference.